Étapes clés du projet :
-
Mars 2023
-
Phase initiale de la Preuve de Concept (POC 1/4).
-
Développement d'un code Python de base pour contrôler un Cessna 152 dans le simulateur X-Plane, démontrant les capacités de contrôle fondamentales.
-
-
Mai 2023
Passé au POC 2/4 en adaptant et en implémentant le code de contrôle sur une carte de développement pour interagir avec la simulation X-Plane.
Meilleure compréhension de l’intégration matériel-logiciel.

-
Juillet 2023
-
Transition vers POC 3/4 avec la mise en œuvre du système sur une structure de drone standard.
-
Capteurs, cartes et actionneurs personnalisés intégrés.
-
Défis importants, marquant une étape cruciale dans les tests et l'itération dans le monde réel.
-
Fabriqué en France dès le premier jour
-
Février 2024
-
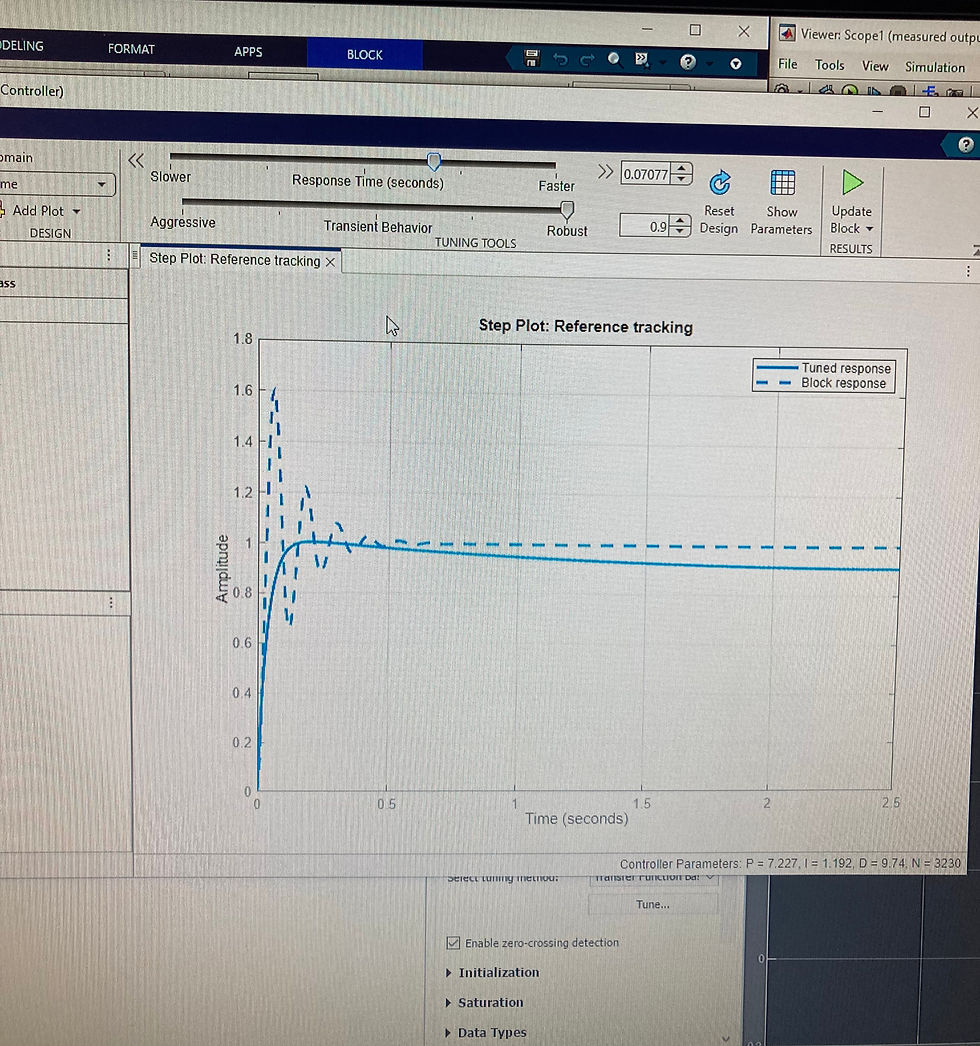
Une campagne d'essais en vol à été menée, surmontant les premiers revers, y compris plusieurs accidents qui ont fourni des informations cruciales pour le réglage du système.
-
Cette expérience a consolidé les bases du projet Crosshair AvioniX, un élément important de l’initiative plus large CoraX.
-
-
Juin 2024
-
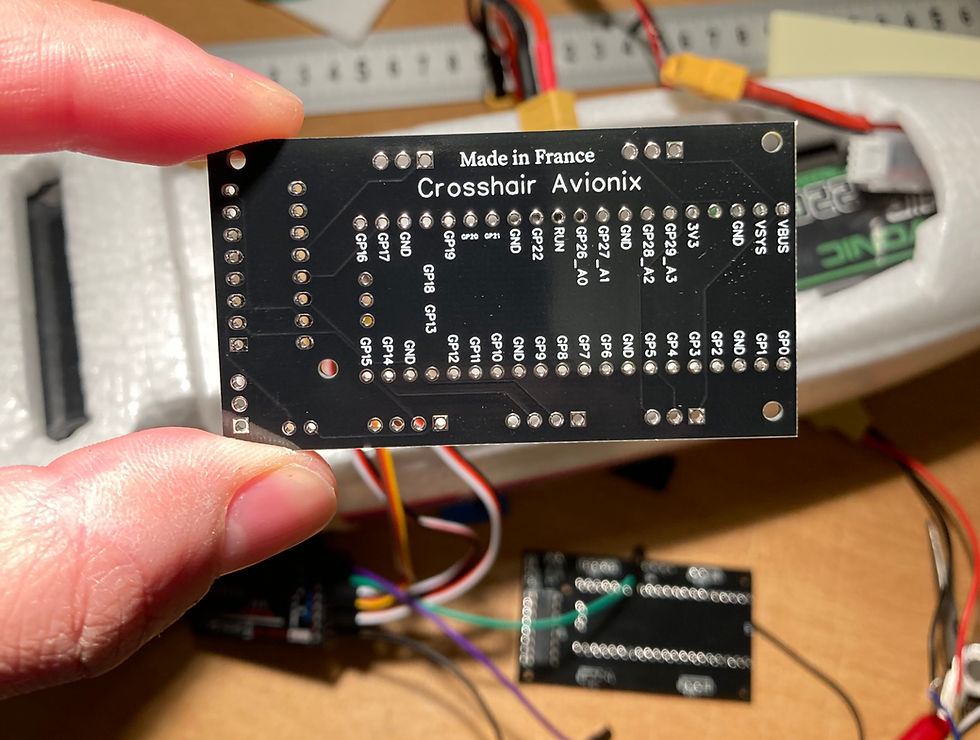
Une étape importante a été franchie avec la production notre premier contrôleur de vol basé sur une puce ARM.
-
Conception d'une carte à deux étages équipée d'unités de navigation avancées, établissant une plate-forme avionique robuste.
-

Crosshair Avionix V3
-
Août 2024
-
Un niveau de maturité a été atteint dans de code de base et l'électronique.
-
Les premiers prototypes structurels ont été imprimés en 3D et testés en vol avec succès.
-
Le drone CoraX a été officiellement conceptualisé et est entré dans la phase de test, marquant l'achèvement du POC 4/4.
-

Le prototype CoraX imprimé en 3D

Vidéo du test « retour au lancement » du prototype CoraX
-
25 décembre 2024
-
Le jour de Noël, Crosshair AvioniX a réalisé une avancée significative avec sa première mission de waypoints, approche et atterrissage automatique, exécutées sur le terrain à l'aide de notre plate-forme de test UAV.
-
-
En 2025
-
Une campagne complète d’essais a été menée avec succès sur les versions CoraX 2 m et 1,5 m, comprenant le décollage et l’atterrissage autonomes, l’exécution de missions par points de passage (waypoints), le géorepérage (geofencing), le retour automatique au point de départ (Return-to-Home) ainsi que les modes d’attente (loitering). Ces essais ont fourni des retours d’expérience précieux qui nous ont permis d’affiner et d’optimiser la conception du système.
-

The CoraX 2m en atterrissage automatique
-
En 2026
-
La gamme de produits CoraX a été définie, accompagnée des premiers Concepts d’Opérations (ConOps) décrivant les cas d’usage réels de chaque plateforme de la famille CoraX.
-
Parallèlement, plusieurs prototypes du drone P1400, plateforme d’entrée de gamme, ont été conçus et fabriqués afin de valider l’architecture du système et de soutenir les premières évaluations opérationnelles.
-
*Pour plus d’informations sur les capacités, la conception et les concepts d’exploitation du P1400, veuillez nous contacter.


Le design du CoraX P1400
-
Prochaines étapes :
-
Finaliser le développement, la validation et le déploiement opérationnel de la station sol Horus afin de garantir sa pleine maturité opérationnelle et sa capacité d’évolution.
-
Transformer CoraX en une entreprise UAV pleinement opérationnelle, dotée de capacités de production, de processus qualité et d’une organisation industrielle structurée.
-
Obtenir les certifications requises pour la plateforme P1400 et finaliser sa préparation en vue de sa commercialisation.
-
Développer les infrastructures, les capacités opérationnelles et les partenariats stratégiques nécessaires pour accompagner la montée en cadence de la production et les futures phases de commercialisation.
-