Project Milestones:
-
March 2023
-
Initial phase of the Proof of Concept (POC 1/4).
-
Developed basic Python code to control a Cessna 152 in the X-Plane simulator, demonstrating foundational control capabilities.
-
-
May 2023
-
Advanced to POC 2/4 by adapting and implementing the control code on a development board to interact with the X-Plane simulation.
-
Enhanced understanding of hardware-software integration.
-

-
July 2023
-
Transitioned to POC 3/4 with the implementation of the system on an off-the-shelf UAV structure.
-
Integrated custom sensors, boards, and actuators.
-
Addressed significant challenges, marking a pivotal step in real-world testing and iteration.
-
Made in France from day one
-
February 2024
-
Conducted a flight test campaign, overcoming early setbacks, including several crashes that provided critical insights for system tuning.
-
The experience solidified the foundation of the Crosshair AvioniX project, a significant component of the broader CoraX initiative.
-
-
June 2024
-
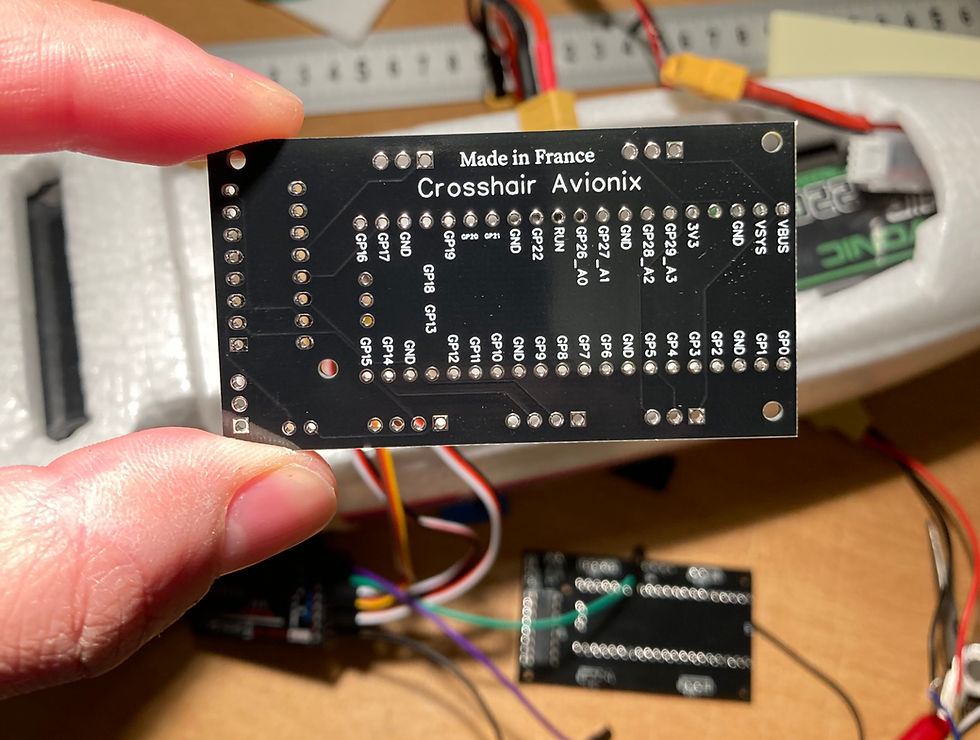
Achieved a major milestone with the production of our first flight controller based on an ARM chip.
-
Designed a two-stage board equipped with advanced navigation units, establishing a robust avionics platform.
-

Crosshair Avionix V3
-
August 2024
-
Attained a new level of maturity in the codebase and electronics.
-
Successfully 3D-printed and tested the first structural prototypes in flight.
-
The CoraX UAV was officially conceptualized and entered the testing phase, marking the completion of POC 4/4.
-

The CoraX 3d printed prototype

The CoraX prototype "return to home" test Video
-
December 25, 2024
-
On Christmas Day, Crosshair AvioniX achieved a significant breakthrough with its first successful waypoint mission and auto-landing operation, executed on the field using the testing platform UAV.
-
-
During 2025
-
Extensive testing has been performed on the CoraX 2 m and 1.5 m platforms, covering autonomous takeoff and landing, waypoint missions, geofencing, return-to-home, and loitering capabilities. The results of these tests have contributed to the refinement and improvement of the overall design.
-

The CoraX 2m auto landing
-
2026
-
The CoraX product lineup has been established, along with the initial Concepts of Operations (ConOps) defining real-world use cases across the CoraX family.
-
In parallel, several prototype units of the entry-level P1400 UAV have been designed and manufactured to validate the platform and support early operational assessments.
-
* For further information regarding the P1400's capabilities, design features, and operational concepts, please contact us.


The CoraX P1400 initial design
-
Next Steps
-
Complete the final development, validation, and deployment of the Horus Ground Control Station (GCS), ensuring full operational readiness and scalability.
-
Transition CoraX from a development initiative into a fully operational UAV company, with established manufacturing, quality assurance, and business processes.
-
Obtain the required certifications for the P1400 platform and finalize its preparation for commercial deployment and market introduction.
-
Develop and implement the infrastructure, operational capabilities, and strategic partnerships necessary to support future scaling, production growth, and commercialization activities.
-